








Hello Acorn fans!
We recently released a new video, linked below. The rest of this post is an article version of the video for those that want to quickly scroll through the screenshots or prefer to read. If you’re new here, make sure to check out our announcement post 82 where we talk more about the motivations and goals of the project.

A closer look at Acorn, our open source precision farming rover

Hello everyone and welcome to Twisted Fields, our research farm in San Gregorio California. My name is Taylor Alexander, my pronouns are they/them, and I love to make robots that help people.
Today I want to tell you a little bit more about Acorn, our open source precision farming rover. We believe that robots like this can help produce healthier food for all, reduce our reliance on harmful agricultural poisons, and fight climate change through regenerative agriculture.
We are often asked: what does our robot do? At this time Acorn is still under development. In the future it will be equipped with a smart vision system and robotic tools that will be able to plant seeds, destroy weeds, monitor plant health, and much more.

To begin the project we’ve created the base vehicle platform capable of bringing those tools to every plant on the farm. We’ve open sourced our work 158 so that others can join in on development, build their own versions, and help in the difficult work of precision tool development. In this article I will provide a basic overview of the design of this vehicle. I hope this will serve as a useful guide for anyone interested in contributing to the project. Before I get started I want you to know that our success depends on you. We must grow a healthy community of enthusiasts, users, and developers who want to see us succeed. If you like what we are doing please subscribe to our youtube channel 49 and click the bell icon to get notified of each of our new videos. We’ve launched a community forum where anyone can join for free and take part in the discussion. You’re here on the community forum now, so please sign up and introduce yourself.
Finally I must underscore that we consider this design very fluid. We are testing Acorn every day and have a new design under development with many improvements. We expect to make this vehicle in different sizes, and some applications like orchard work may require batteries instead of solar panels. What you’re about to see is our current prototype. I hope you enjoy it.
With that out of the way let’s take a look at Acorn.

Acorn uses eight 100 watt solar panels fed into an array of super capacitors to take solar energy and use it as efficiently as possible. Our goal is to build Acorn so that it works when the sun is shining. We use these super capacitors instead of lithium batteries because they last over a million cycles. They’ll essentially never wear out.

Acorn is made out of lightweight materials including welded aluminum and bicycle parts. When it’s driving on level ground it only draws about 20 watts of electricity. That leaves plenty of room for the tools to draw power when they’re working on the field.
Acorn is four wheel drive and four wheel steering. The four wheel drive means it’s very capable even in a muddy field after a rainfall. The four wheel steering means it can crab sideways between rows, and we’ve made every corner assembly identical. This makes manufacturing and assembly simpler and it reduces the part count.

As I said we use mountain bike parts. We hope this will make sourcing easier anywhere in the world. These 3.8 inch mountain bike tires float over anything. We use sealed geared hub motors 42. They throw the mud right off of them and keep going even when it’s raining, and then up top we’ve got the steering assembly. We use mountain bike parts up to a sprocket with a chain drive with the motor seen in the top left.
In the next version, the steering system will be all aluminum instead of 3d printed parts. So far these are holding up okay on the prototype though.
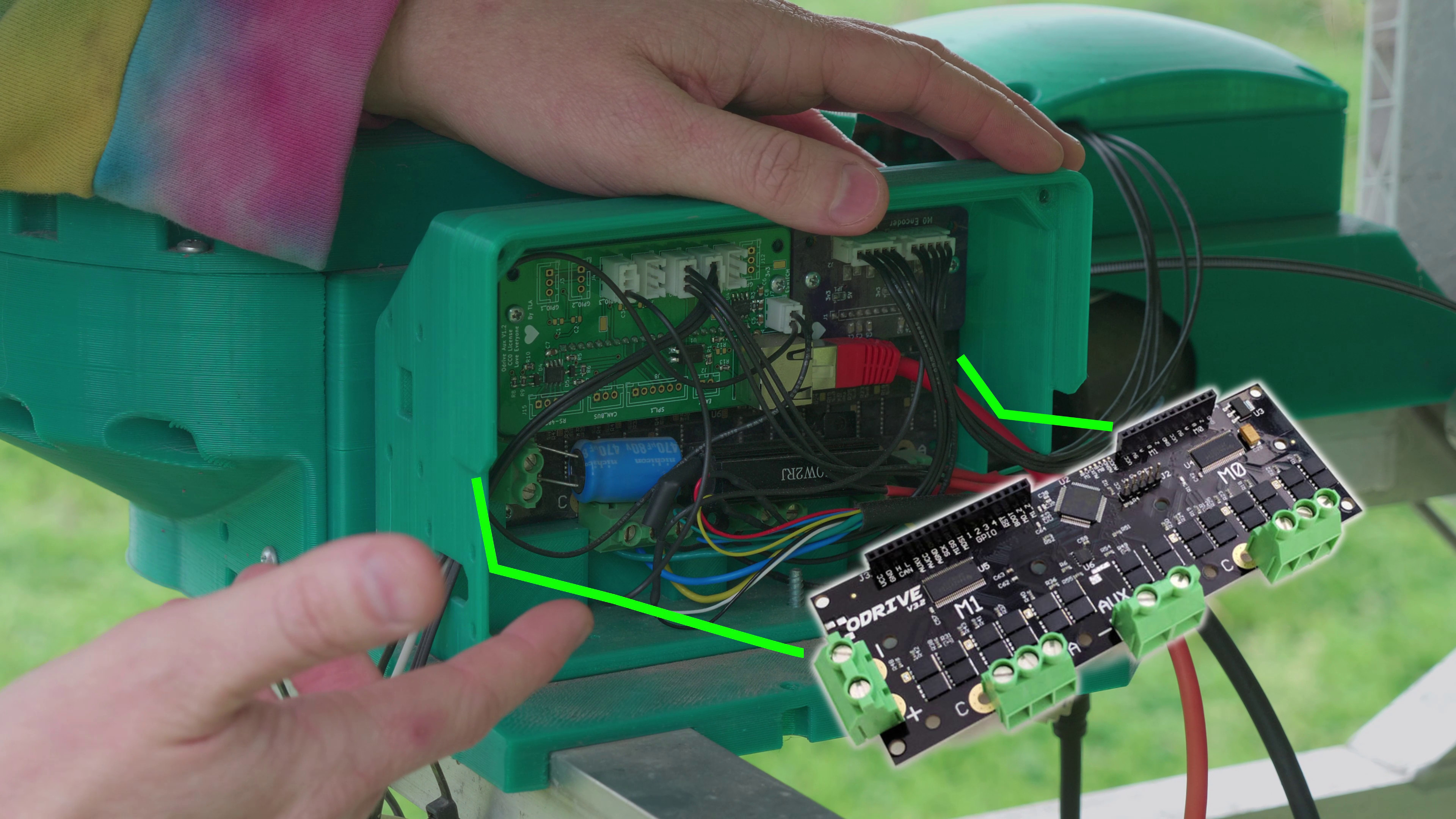
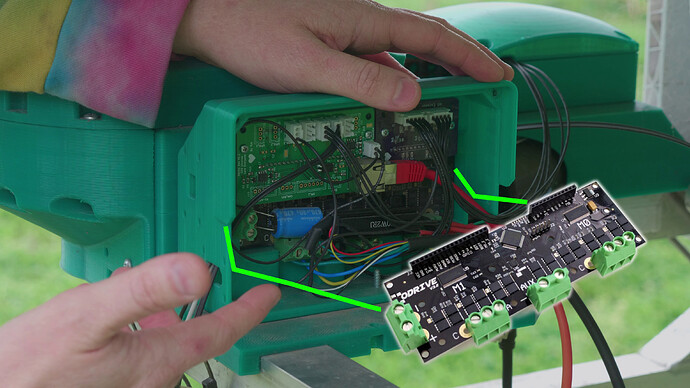
Now all the wiring housings on this prototype keep getting messier and messier as we add more stuff. On the final version we’ll add plenty of room for everything with clean wiring, but you can see in here we’ve got the Odrive motor controller which is open source and has a great development community. By building open source into Acorn we’ve made it easier to develop on and work with.
The Odrive motor controller controls both the steering motor and the drive motor on each corner assembly, making them self-contained.

Acorn uses a precision RTK GPS system 35 with two antennas in the corners of the vehicle plus another one on the fixed base station. The base station automatically records the errors from the incoming satellite data and sends those corrections to Acorn in real time. This allows Acorn to follow pre-recorded GPS paths to within centimeters of the programmed position.

This is Acorn’s work envelope. Underneath here is where we’ll mount the tools which then will tend to the field. We’ve already got the precision camera system under development. The cameras feed in to an NVIDIA Jetson computer, and we will use machine learning techniques to look at the ground and understand what needs to be done. In order to make this really work we’re going to be building a public data set and working with researchers to try to solve some of the tough problems in machine learning here.
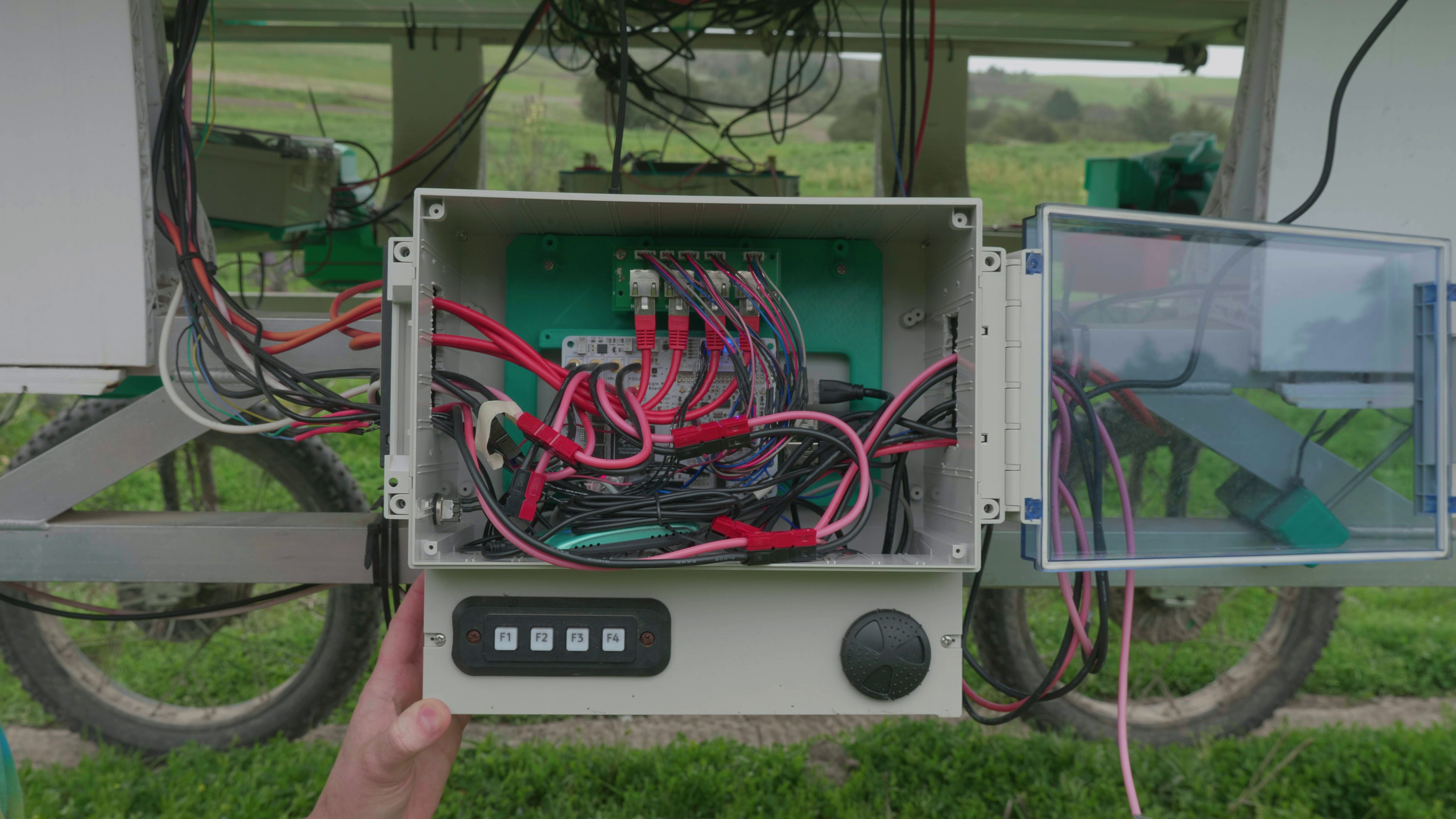
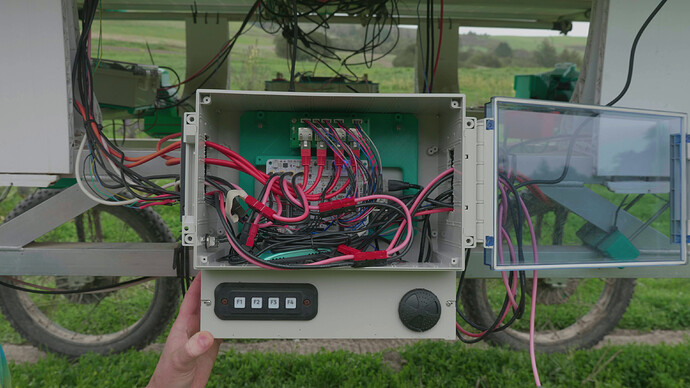
All of Acorn’s basic functions are controlled by Python from a Raspberry Pi. Inside of this weather sealed computer housing we’ve got our custom designed motherboard which is designed in Kicad, an open source PCB design program 11. This whole system has been designed to be open source from the beginning. As I said these prototype wiring housings get messy and the final version will have everything designed with proper wire routing. We keep adding stuff to the prototype so it always gets a little more complicated over time.
Currently we’re using off-the-shelf ethernet cables to send RS-485 and emergency stop signals to all four corner assemblies. Acorn has a sophisticated emergency stop system which means that whether there’s a fault in one of the corners, you hit the e-stop button, or if there’s any software fault in python it’ll stop all eight motors. Let’s take a closer look at the motherboard inside.

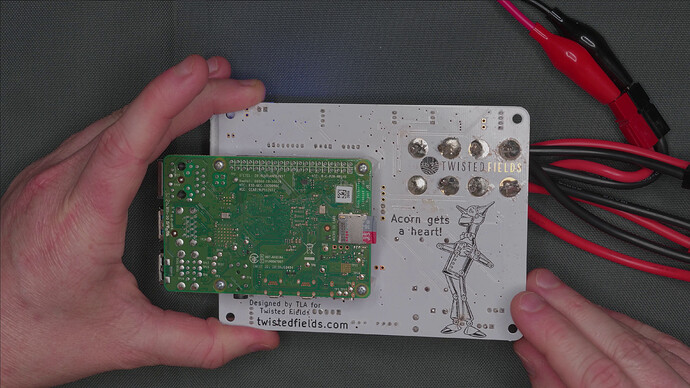
Just a quick closer look at the motherboard here. On the back you can see the Raspberry Pi computer which controls everything plus a little bit of artwork.
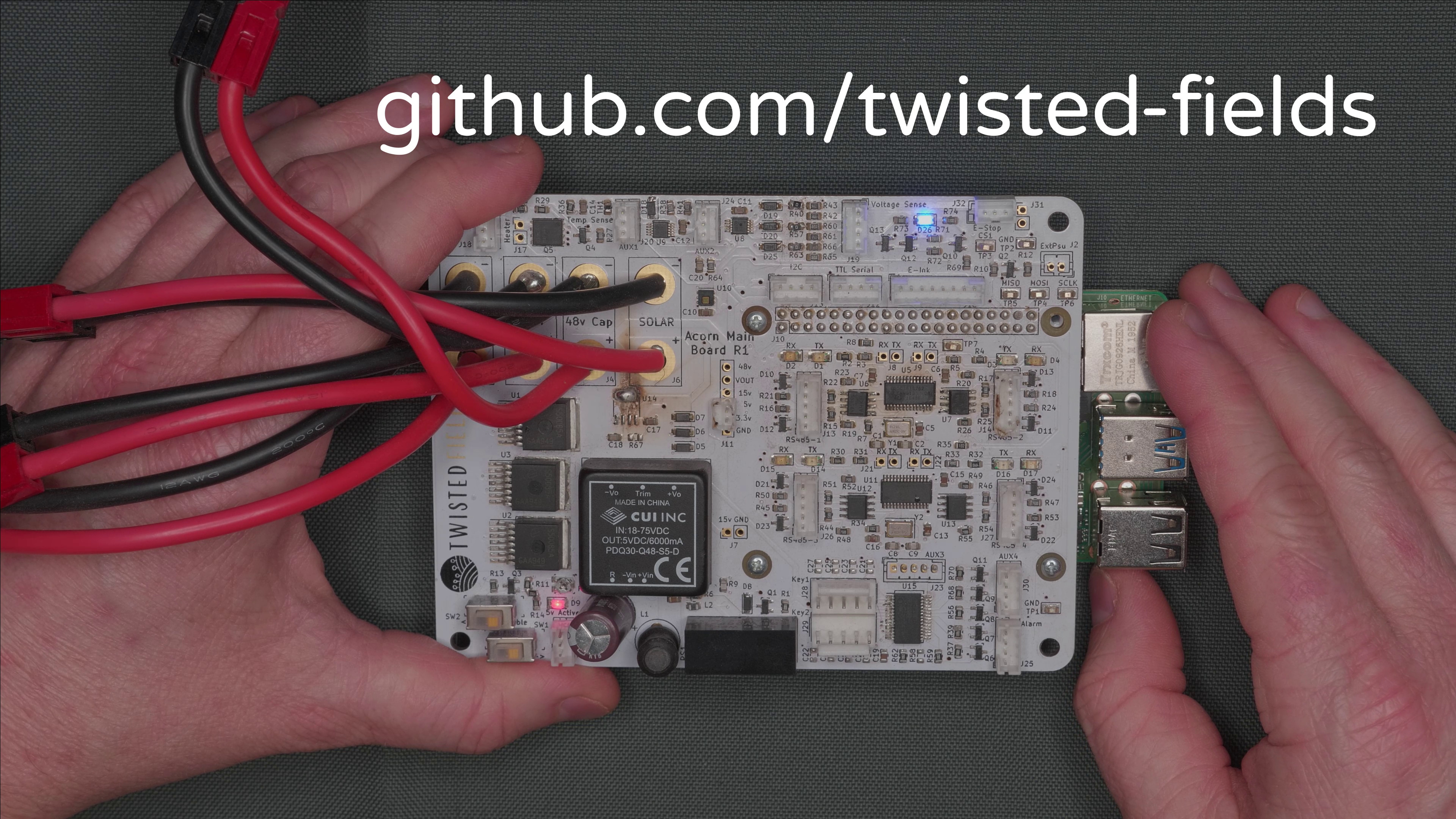
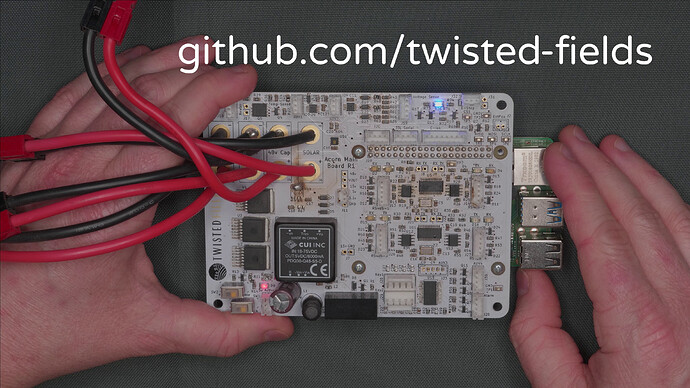
And then on the top side here we have the power input which takes 18 to 75 volt dc input and converts that to what we need for the board. We’ve got high power control switches here and those go to these outputs. This lets us use the Raspberry Pi to turn on and off power to the motors.
We’ve got hardware motor outputs which are RS-485 signals. Using hardware RS-485 outputs means we don’t have to control the motors over USB so it’s much safer and more robust. And then there’s just a whole lot of other inputs and outputs here: reading voltage inputs, things for controlling the external alarm you hear at the end of the video, keypad inputs, temperature sensors, external power supply control, expansion for a screen - all kinds of goodies on here. This whole board is completely open source and on our github 158.

All right and that’s Acorn! Development is ongoing and we would love to know what you think. If you’re signed up for this site please leave a comment below and let us know your thoughts. It also helps us with the youtube algorithm if you hit the like button on the video 52, comment on the video, and subscribe to our channel 49.
To really join the discussion sign up for free right on this site and introduce yourself 13!
Thank you so much for watching.
